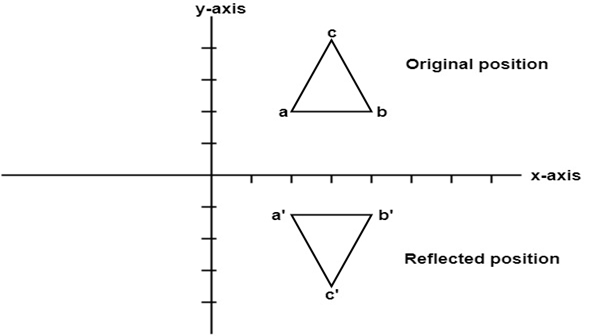
It is a transformation which produces a mirror image of an object. The mirror image can be either about x-axis or y-axis. The object is rotated by180°.
Types of Reflection:
- Reflection about the x-axis
- Reflection about the y-axis
- Reflection about an axis perpendicular to xy plane and passing through the origin
- Reflection about line y=x
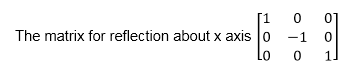
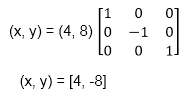
1. Reflection about x-axis: The object can be reflected about x-axis with the help of the following matrix
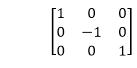
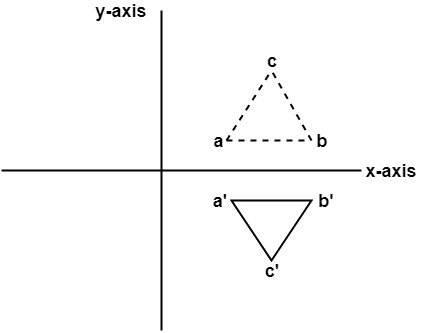
In this transformation value of x will remain same whereas the value of y will become negative. Following figures shows the reflection of the object axis. The object will lie another side of the x-axis.
2. Reflection about y-axis: The object can be reflected about y-axis with the help of following transformation matrix
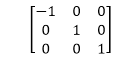
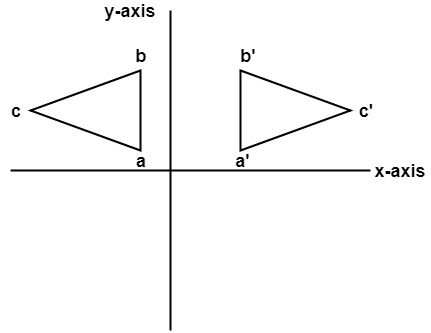
Here the values of x will be reversed, whereas the value of y will remain the same. The object will lie another side of the y-axis.
The following figure shows the reflection about the y-axis
3. Reflection about an axis perpendicular to xy plane and passing through origin:
In the matrix of this transformation is given below
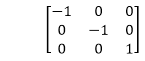
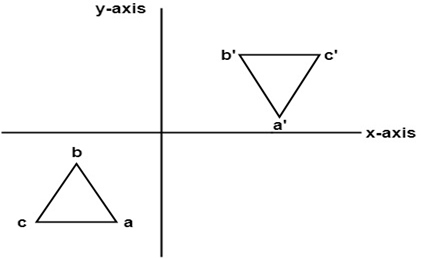
In this value of x and y both will be reversed. This is also called as half revolution about the origin.
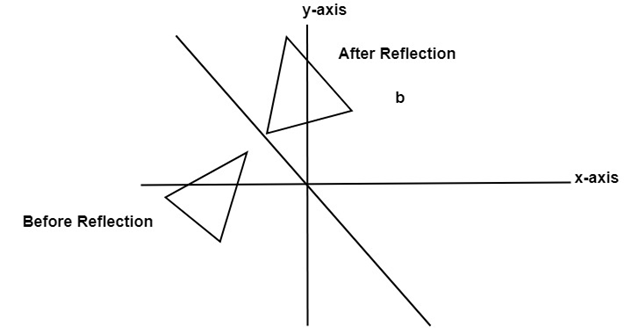
4. Reflection about line y=x: The object may be reflected about line y = x with the help of following transformation matrix
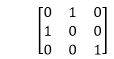
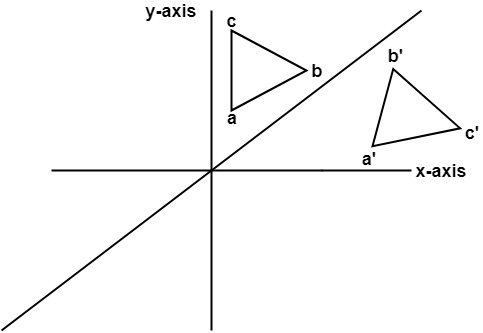
First of all, the object is rotated at 45°. The direction of rotation is clockwise. After it reflection is done concerning x-axis. The last step is the rotation of y=x back to its original position that is counterclockwise at 45°.
Example: A triangle ABC is given. The coordinates of A, B, C are given as
A (3 4)
B (6 4)
C (4 8)
Find reflected position of triangle i.e., to the x-axis.
Solution:
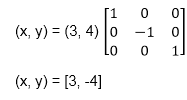
The a point coordinates after reflection
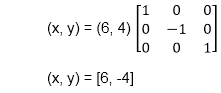
The b point coordinates after reflection
The coordinate of point c after reflection
a (3, 4) becomes a1 (3, -4)
b (6, 4) becomes b1 (6, -4)
c (4, 8) becomes c1 (4, -8)
Program to perform Mirror Reflection about a line:
#include <iostream.h>
#include <conio.h>
#include <graphics.h>
#include <math.h>
#include <stdlib.h>
#define pi 3.14
class arc
{
float x[10],y[10],theta,ref[10][10],ang;
float p[10][10],p1[10][10],x1[10],y1[10],xm,ym;
int i,k,j,n;
public:
void get();
void cal ();
void map ();
void graph ();
void plot ();
void plot1();
};
void arc::get ()
{
cout<<"\n ENTER ANGLE OF LINE INCLINATION AND Y INTERCEPT";
cin>> ang >> b;
cout <<"\n ENTER NO OF VERTICES";
cin >> n;
cout <<"\n ENTER";
for (i=0; i<n; i++)
{
cout<<"\n x["<<i<<"] and y["<<i<<"]";
}
theta =(ang * pi)/ 180;
ref [0] [0] = cos (2 * theta);
ref [0] [1] = sin (2 * theta);
ref [0] [2] = -b *sin (2 * theta);
ref [1] [0] = sin (2 * theta);
ref [1] [1] = -cos (2 * theta);
ref [1] [2] = b * (cos (2 * theta)+1);
ref [2] [0]=0;
ref [2] [1]=0;
ref [2] [2] = 1;
}
void arc :: cal ()
{
for (i=0; i < n; i++)
{
p[0] [i] = x [i];
p [1] [i] = y [i];
p [2] [i] = 1;
}
for (i=0; i<3;i++)
{
for (j=0; j<n; j++)
{
p1 [i] [j]=0;
for (k=0;k<3; k++)
}
p1 [i] [j] + = ref [i] [k] * p [k] [j];
}
for (i=0; i<n; i++)
{
x1 [i]=p1[0] [i];
y1 [i] = p1 [1] [i];
}
}
void arc :: map ()
{
int gd = DETECT,gm;
initgraph (&gd, &gm, " ");
int errorcode = graphresult ();
/* an error occurred */
if (errorcode ! = grOK)
{
printf ("Graphics error: %s \n", grapherrormsg (errorcode));
printf ("Press any key to halt:");
getch ();
exit (1); /* terminate with an error code */
}
}
void arc :: graph ()
{
xm=getmaxx ()/2;
ym=getmaxy ()/2;
line (xm, 0, xmm 2*ym);
}
void arc :: plot 1 ()
{
for (i=0; i <n-1; i++)
{
circle (x1[i]+xm, (-y1[i]+ym), 2);
line (x1[i]+xm, (-y1[i]+ym), x1[i+1]+xm, (-y1[i+1]+ym));
}
line (x1[n-1)+xm, (-y1[n-1]+ym), x1[0]+xm, (-y1[0]+ym));
getch();
}
void arc :: plot ()
{
for (i=0; i <n-1; i++)
{
circle (x1[i]+xm, (-y1[i]+ym, 2);
line (x1[i]+xm, (-y1[i]+ym), x[i+1]+xm, (-y1[i+1]+ym));
}
line (x[n-1]+xm, (-y1[n-1]+ym), x[0]+xm, (-y[0]+ym));
getch();
}
void main ()
{
class arc a;
clrscr();
a.map();
a.graph();
a.get();
a.cal();
a.plot();
a.plot1();
getch();
}
Output:
















No comments:
Post a Comment